深圳市三亞微科技有限公司
電 ?話:0755-83936736
傳 ?真:0755-82719377?
郵 ?箱:sales@sanyaw.cn
地 ?址:深圳市福田區(qū)振華路100號深紡大廈C座7108

幾個(gè)月前,一架無人機(jī)墜毀在美國總統(tǒng)居住地白宮的草坪上,引起了人們對于無人機(jī)安全操作的廣泛關(guān)注。無人機(jī)想要繼續(xù)發(fā)展,除了續(xù)航、功能進(jìn)步之外,安全性也是不可小覷的方面。

無人機(jī)在飛行過程中能否自動(dòng)識別到飛行軌跡上的障礙物(固定、移動(dòng)或突然出現(xiàn)),并且能及時(shí)的躲避,改變和調(diào)整飛行軌跡,這個(gè)是影響無人機(jī)安全運(yùn)行的重要方面。這樣的系統(tǒng)被稱為自動(dòng)避障系統(tǒng)”(Obstacle Avoidance),屬于飛控子系統(tǒng)的重要組成部分之一。
目前主流的無人機(jī)避障系統(tǒng)主要有三種,超聲波雷達(dá)、TOF測距、以及相對更復(fù)雜的、由多種測距方法和視覺圖像處理組成的復(fù)合型避障系統(tǒng)。
超聲波測距
超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,超聲波發(fā)射器向某一方向發(fā)射超聲波,在發(fā)射的同時(shí)開始計(jì)時(shí),超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計(jì)時(shí)。超聲波在空氣中的傳播速度為340m/s,根據(jù)計(jì)時(shí)器記錄的時(shí)間t,就可以計(jì)算出發(fā)射點(diǎn)距障礙物的距離(S),即:S=340t/2 。這就是時(shí)間差測距法。超聲波測距原理與雷達(dá)原理是一樣的。
無人機(jī)上飛控系統(tǒng)即可。加裝定向的超聲波發(fā)射和接收器,由于超聲波易于定向發(fā)射、方向性好、強(qiáng)度易控制、與被測量物體不需要直接接觸的優(yōu)點(diǎn)。
TOF測距
TOF是飛行時(shí)間(Time of Flight)技術(shù)的縮寫,飛行時(shí)間 – 這是一個(gè)光脈沖前往目標(biāo)并返回的時(shí)間。即傳感器發(fā)出經(jīng)調(diào)制的近紅外光,遇物體后反射,傳感器通過計(jì)算光線發(fā)射和反射時(shí)間差或相位差,來換算被拍攝景物的距離 。
對于小距離測距(<10m),通常使用三角測量法。 使用這種方法實(shí)現(xiàn)的精度在微米級范圍內(nèi),但測量的距離很有限。對于100米左右的距離,人經(jīng)常使用的相移測量技術(shù)。 通過激光調(diào)制,傳出和傳入的光之間的相移給計(jì)算出距離。 為了達(dá)到毫米范圍內(nèi)的分辨率,對采樣率的要求非常高。使用時(shí)間數(shù)字轉(zhuǎn)換器,人們有了捷徑來數(shù)字化飛行時(shí)間。 它使直接測量光的飛行時(shí)間成為可能。 原理很簡單,但是細(xì)節(jié)是難點(diǎn)!總所周知,光的飛行速度很快。
C=299792458
C:=光速
因此, 必須能夠處理極短的時(shí)間。 在僅僅 1 微秒的時(shí)間里, 光線就可以穿過 300 米! 高分辨率意味著在時(shí)間測量中的最高精度。一般情況下,光線能夠通過一個(gè)物體和鏡子反射回來,所有光線通過兩倍
的實(shí)際距離。所以我們得出:
D=C/2*TOF
這個(gè)范圍非常適合使用杭州瑞盟公司的MS1022。 單個(gè)芯片TDC 有一個(gè)單一的分辨率 90ps ,它相當(dāng)于13.5mm 距離。通過平均可以提高分辨率到<10ps or<1.5mm。MS1022 是一個(gè)非常通用的集成電路,它可以在不同的模式下被使用。具體哪個(gè)模式被選擇,我們看一下具體的說明:
MS1022內(nèi)部框圖及典型應(yīng)用,如圖1
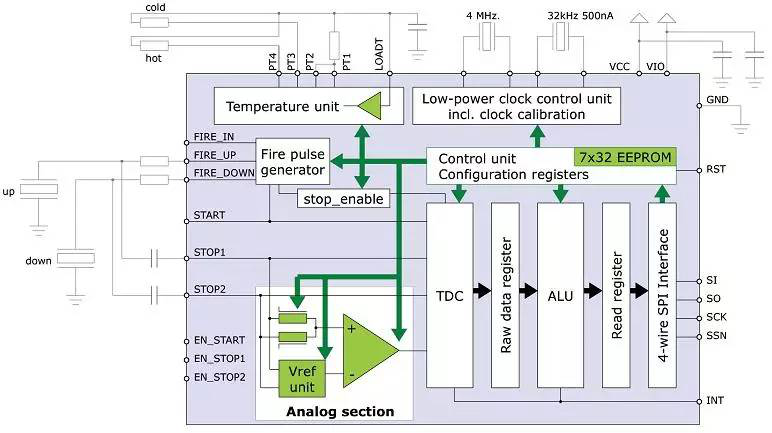 圖1:MS1022內(nèi)部框圖及典型應(yīng)用
圖1:MS1022內(nèi)部框圖及典型應(yīng)用
MS1022 測量范圍從0到300m
? 測量范圍從 3.5 ns 到 2. 0 μs (0到2.0μs在不同的Stop通道之間)
? Typ.90ps分辨率rms (13.5 mm)
? 可以通過平均來達(dá)到更好的分辨率
? 直到每秒500,000 次測量
? 20 ns 最小脈沖間隔, 最多接受 4個(gè)脈沖
? 對于每一個(gè)通道的四次采樣能力
? 對于每個(gè)通道可選擇上升 和/或下降沿觸發(fā)
? 窗口功能的使能引腳
MS1022無人機(jī)避障系統(tǒng)應(yīng)用框圖,如圖2:
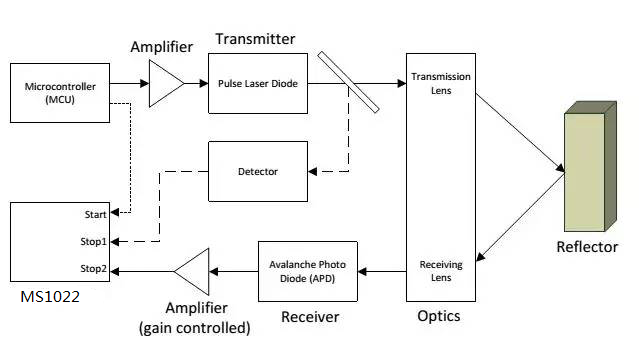
![]() 圖2:MS1022無人機(jī)避障系統(tǒng)應(yīng)用框圖
圖2:MS1022無人機(jī)避障系統(tǒng)應(yīng)用框圖
MS1022 從微處理器得到一個(gè)假測量的開始。光學(xué)參考觸發(fā)Stop1, 反射光束觸發(fā)Stop2。通過MS1022內(nèi)部高速DSP進(jìn)行計(jì)算,得到無人機(jī)與障礙物之間的實(shí)時(shí)距離,將數(shù)據(jù)傳輸給飛控主控器,做為系統(tǒng)控制參數(shù)之一,調(diào)整飛行的速度和方向,保證無人機(jī)的安全、可靠飛行。
深圳市三亞微科技有限公司 ? 粵ICP備16121575號? ?地址:深圳市南山區(qū)西麗街道珠光路56號2樓整層
Copyright ? 2015,www.dongchengs.com?,All rights reserved